部门:机电学院办公室 供稿:单晓微 审核:陈娟 发布时间:2020-04-23 阅读次数:
字号大小
近日,机电学院青年教师单晓微作为第一作者和通讯作者(北京建筑大学为第一单位),联合加拿大蒙特利尔综合理工大学Lionel Birglen教授,在机器人研究领域顶级期刊《The International Journal of Robotics Research》(IJRR)上发表论文“Modeling and analysis of soft robotic fingers using the fin ray effect”。
《The International Journal of Robotics Research》(IJRR)是第一本有关机器人研究的学术出版物,也是当今机器人学领域排名第一的期刊,影响因子6.134。IJRR提供领域内杰出学者针对突破性前沿问题、技术发展和机器人学理论等方面研究撰写的开创性原创论文。IJRR一直在Thomson Scientific JCR类别中排名前三,其刊载的学术文章为工程师、研究人员和科学家展示了最前沿的机器人技术研究动态,惠及应用数学、人工智能、计算机科学,电气和机械工程等多个领域。截止到2020年4月的IJRR官网检索中,以中国境内学者/单位作为第一作者/单位的文章共18篇,包括单晓微在内的第一作者15人。

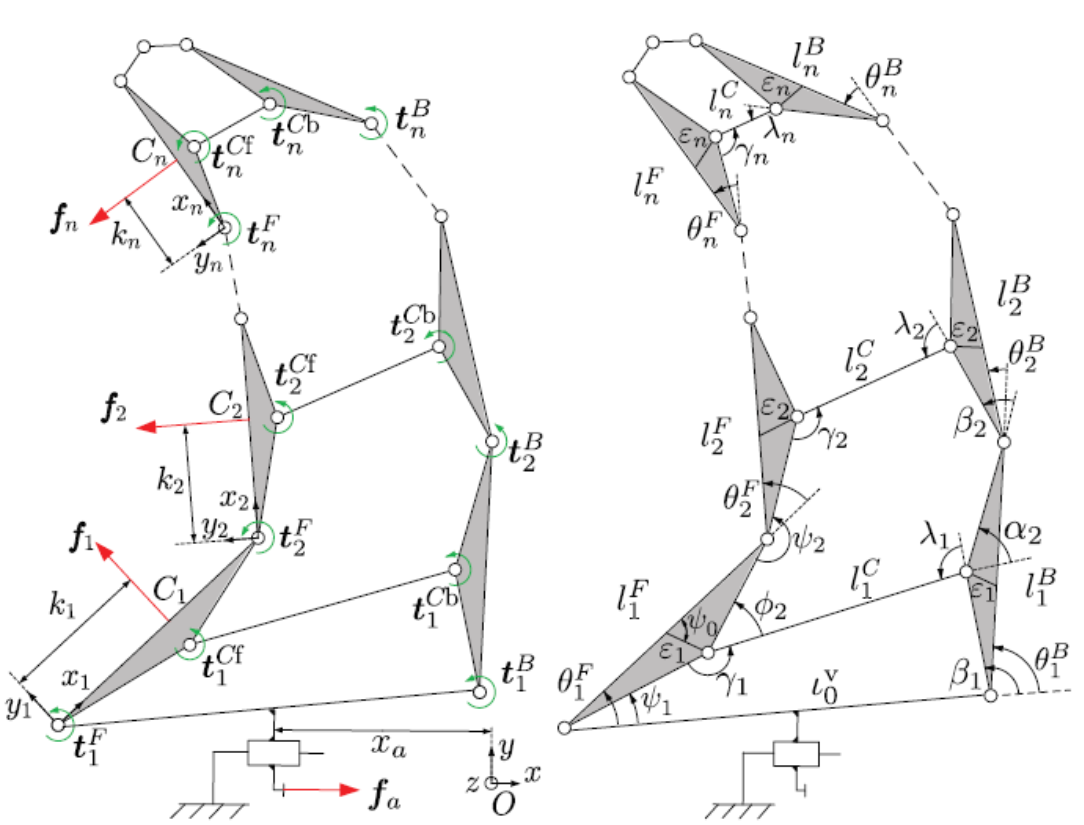
单晓微发表的论文系统总结了她在软性机器人手指研究中取得的成果。论文针对非结构环境中的复杂因素,提出通过精确建模实现机器人软性手和手指的接触力估计。论文详细阐述了利用鳍条效应(FRE)的软性手指平行爪的详细数学建模和性能分析方法。数学模型经过多体仿真和物理实验验证,并分析阐明刚度分布对抓握性能的影响,为理解和设计通用FRE软性手指的抓握能力提供了解析工具和优化方法。


单晓微个人介绍

单晓微,加拿大麦吉尔大学机械工程专业获得哲学博士学位;曾担任蒙特利尔大学工学院机器人实验室博士后研究员。主要研究方向包括机器人学、微机电一体化系统设计、机械系统动力学与控制。于2012—2018年先后参与/主持多项加拿大自然科学与工程研究(NSERC)基金项目、魁北克自然科学与工程研究(FRQNT)基金项目和加拿大微电子系统联盟(CMC Microsystems)MNT资助项目。发表/授权20余篇SCI/EI检索学术论文、发明专利和公开技术报告。在国内外学术会议和业内标准技术研讨会议中进行报告演讲,设计制造的机械手抓握通用测试台,由美国国家标准技术研究所(NIST)和电气和电子工程师协会机械手抓取与操作技术委员会(IEEE RHGM)发布推广。授有《机器人技术》、《机器人设计与控制》、《系统动力学与控制》、《机械设计制图》等中英文专业课程。
编辑:高蕾






